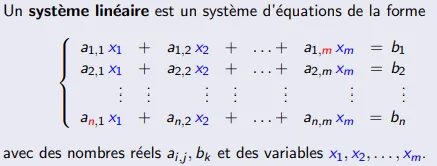
Cet algorithme permet de résoudre les systèmes linéaires :
On place un “curseur” à l’indice en haut à gauche de la matrice. Si la valeur du curseur est nulle, on cherche une ligne (vers le bas) où le coefficient de la colonne du curseur est non nulle et on échange cette ligne avec la ligne du curseur. S’il n’y en a pas, on bouge le curseur vers la droite et on recommence. Si ce n’est pas possible, on s’arrête
On divise la ligne du curseur par la valeur du curseur
On éliminé tous les coefficients de la colonne du curseur qui ne sont pas sur la ligne du curseur en soustrayant à chaque ligne des multiples adaptés de la ligne du curseur
On bouge le curseur une ligne plus bas et une colonne vers la droite. Si ce n’est pas possible, on s’arrête. Sinon on retourne à l’étape 1
La propriété 4 revient à dire que l’on a moins d’1 pivot par colonne. Donc il existera des variables libres, ce qui conduit à une infinité de solutions (qui dépendent d’un paramètre) ou pas de solutions (si l’on a par exemple une ligne telle que [000∣1])
Un système linéaire avec n équations et n lignes (donc avec une matrice des coefficients de taille n×n) admet une unique solution si Rang(M)=n. La matrice des coefficients obtenue est la matrice identité, qui est une matrice diagonale avec uniquement des 1 comme coefficients :
Avec un système qui comporte des paramètres, on a par exemple la matrice :
111−1m−11−1−1∣∣∣m11
On cherche alors à exprimer les coefficients sans paramètres et sous forme de Frel.
Par exemple, on peut faire :
{L2←L2−L1L3←L3−L1
Ce qui nous donne la matrice
100−1m+101−1−2∣∣∣m1−m1−m
On peut donc raisonner selon la valeur de m. Si m+1=0, donc si m∈R\{−1}, alors on peut diviser les lignes du système par m+1 et donc pouvoir aboutir à une Frel.
On obtient finalement la matrice (après différentes étapes de division etc) :
Le produit d’une matrice par un vecteur donne une combinaison linéaire : expression construite à partir d’un ensemble de termes en multipliant chaque terme par une constante et en ajoutant le résultat. Par exemple, une combinaison linéaire de x et y serait une expression de la forme ax + by, où a et b sont des constantes.
Soient deux fonctions f : \mathbb{N} \mapsto \mathbb{N} et g : \mathbb{N} \mapsto \mathbb{N}, on dit que f(N) est dominée par g(N), aussi noté f(N) \in O(g(N)) s’il existe des constantes c et k…